一. 引言
现在低功耗蓝牙(BLE)连接都是建立在 GATT (Generic Attribute Profile) 协议之上。GATT 是一个在蓝牙连接之上的发送和接收很短的数据段的通用规范,这些很短的数据段被称为属性(Attribute)。
二. GAP
详细介绍 GATT 之前,需要了解 GAP(Generic Access Profile),它在用来控制设备连接和广播。GAP 使你的设备被其他设备可见,并决定了你的设备是否可以或者怎样与合同设备进行交互。例如 Beacon 设备就只是向外广播,不支持连接,小米手环就等设备就可以与中心设备连接。
2.1 设备角色
GAP 给设备定义了若干角色,其中主要的两个是:外围设备(Peripheral)和中心设备(Central)。
外围设备:这一般就是非常小或者简单的低功耗设备,用来提供数据,并连接到一个更加相对强大的中心设备。例如小米手环。
中心设备:中心设备相对比较强大,用来连接其他外围设备。例如手机等。
2.2 广播数据
在 GAP 中外围设备通过两种方式向外广播数据: Advertising Data Payload(广播数据)和 Scan Response Data Payload(扫描回复),每种数据最长可以包含 31 byte。这里广播数据是必需的,因为外设必需不停的向外广播,让中心设备知道它的存在。扫描回复是可选的,中心设备可以向外设请求扫描回复,这里包含一些设备额外的信息,例如设备的名字。(广播的数据格式我将另外专门写一个篇博客来讲。)
2.3 广播流程
GAP 的广播工作流程如下图所示。

从图中我们可以清晰看出广播数据和扫描回复数据是怎么工作的。外围设备会设定一个广播间隔,每个广播间隔中,它会重新发送自己的广播数据。广播间隔越长,越省电,同时也不太容易扫描到。
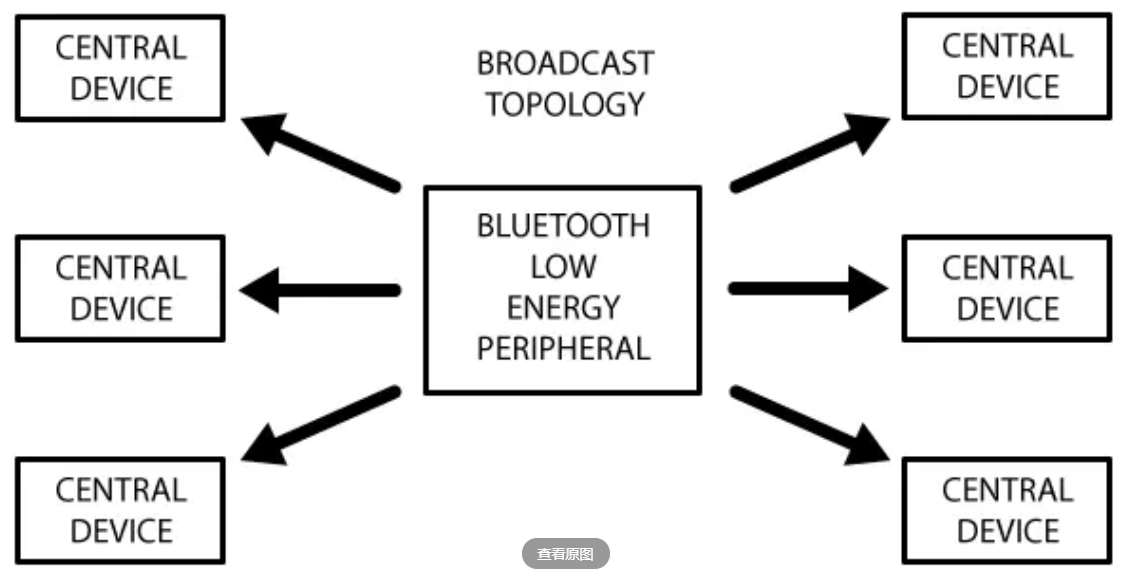
2.4 广播的网络拓扑结构
大部分情况下,外设通过广播自己来让中心设备发现自己,并建立GATT连接,从而进行更多的数据交换。也有些情况是不需要连接的,只要外设广播自己的数据即可。用这种方式主要目的是让外围设备,把自己的信息发送给多个中心设备。因为基于GATT连接的方式的,只能是一个外设连接一个中心设备。使用广播这种方式最典型的应用就是苹果的iBeacon。广播工作模式下的网络拓扑图如下:
三. GATT
GATT 的全名是 Generic Attribute Profile(姑且翻译成:普通属性协议),它定义两个 BLE 设备通过叫做 Service 和 Characteristic 的东西进行通信。GATT 就是使用了 ATT(Attribute Protocol)协议,ATT 协议把 Service, Characteristic遗迹对应的数据保存在一个查找表中,次查找表使用 16 bit ID 作为每一项的索引。
一旦两个设备建立起了连接,GATT 就开始起作用了,这也意味着,你必需完成前面的 GAP 协议。这里需要说明的是,GATT 连接,必需先经过 GAP 协议。实际上,我们在 Android 开发中,可以直接使用设备的 MAC 地址,发起连接,可以不经过扫描的步骤。这并不意味不需要经过 GAP,实际上在芯片级别已经给你做好了,蓝牙芯片发起连接,总是先扫描设备,扫描到了才会发起连接。
GATT 连接需要特别注意的是:GATT 连接是独占的。也就是一个 BLE 外设同时只能被一个中心设备连接。一旦外设被连接,它就会马上停止广播,这样它就对其他设备不可见了。当设备断开,它又开始广播。
中心设备和外设需要双向通信的话,唯一的方式就是建立 GATT 连接。
3.1 GATT连接的网络拓扑
下图展示了 GTT 连接网络拓扑结构。这里很清楚的显示,一个外设只能连接一个中心设备,而一个中心设备可以连接多个外设。
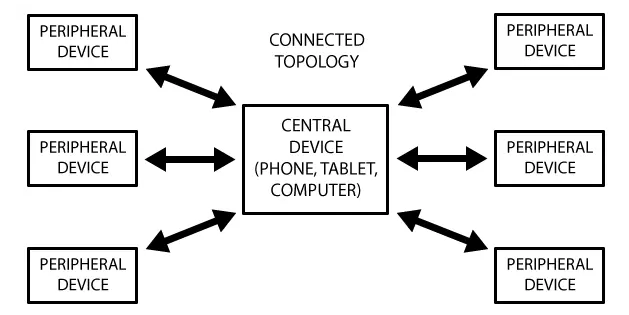
一旦建立了连接,通信就是双向的了,对比前面的GAP广播的网络塔扑,GAP通信是单向的。如果你要让两个外围设备能通信,就只能通过中心设备中转。
3.2 GATT 通信事务
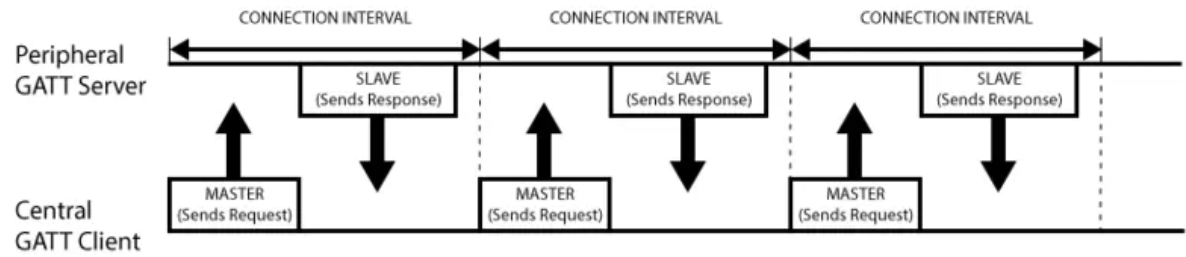
GATT通信的双方是C/S关系。外设作为GATT服务端(Server),它维持了ATT的查找表以及service和characteristic的定义。中心设备是GATT客户端(Client),他向Server发起请求。需要注意的是,所有的通信事件,都是由客户端(也叫主设备,Master)发起,并且接收服务端(也叫从设备,Slava)的响应。
一旦连接建立,外设将会给中心设备建议一个 连接间隔(Connection Interval),这样,中心设备就会在每个连接间隔尝试去重新连接,检查是否有新的数据。但是,这个连接间隔只是一个建议,你的中心设备可能并不会严格按照这个间隔来执行,例如你的中心设备正在忙于连接其他的外设,或者中心设备资源太忙。
下图展示一个外设(GATT服务端)和中心设备(GATT客户端)之间的数据交流流程,可以看到的是,每次都是主设备发起请求:
3.3 GATT 结构
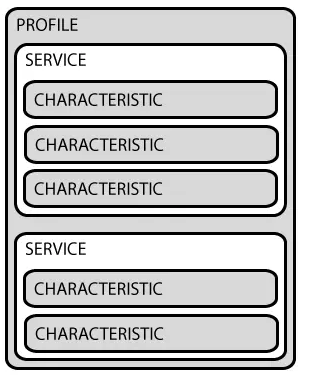
GATT事务是建立在嵌套的Profiles,Services和Characteristics之上的,如下如所示:
-
Profile Profile并不是实际存在于BLE外设上的,它只是一个被Bluetooth SIG或者外设设计者预先定义的Service的集合。例如心率Profile(Heart Rate Profile)就是结合了Heart Rate Service和Device Information Sercvice。所有官方通过GATT Profile的列表可以从这里找到。
-
Service Service是把数据分成一个个的独立逻辑项,它包含一个或者多个Characteristic。每个Service有一个UUID唯一标识。UUID有16bit的,或者128bit的。16bit的UUID是官方通过认证的,需要花钱购买,128bit是自定义的,这个就可以自己随便设置。
官方通过了一些标准Service,完整列表在这里。以Heart Rate Service为例,可以看到它的官方通过16bitUUID是 0x180D,包含3个Characteristic:Heart Rate Measurement,Body Sensor Location和Heart Control Point,并且定义了只有一个第一个必须的,它是可选实现的。
-
Characteristic 在GATT事务中的最低界别的是Characteristic,Characteristic是最小的逻辑数据单元,当然它可能包含一个组关联的数据,例如加速度计的X/Y/Z三轴值。与Service类似,每个Characteristic用16bit或者128bit的UUID唯一标识。你可以免费使用Bluetooth SIG官方定义的标准Characteristic,使用官方定义的,可以确保BLE的软件和硬件能相互理解。当然,你可以自定义Characteristic,这样的话,就只有你自己的软件和外设能够相互理解。
举个例子,Heart Rate Measurement Characteristic,这是上面提到的Heart Rate Service必需实现的Characteristic,它的UUID是 0x2A37。它的数据结构是,开始8bit定义心率数据格式(是UINT8还是UINT16?),接下来就是对应格式的实际心率数据。
实际上,和BLE外设打交道,主要是通过Characteristic。你可以从Characteristic读取数据,也可以往Characteristic写数据。这样就实现了双向的通信。所以你可以自己实现一个类似串口(UART)的service,这个Service中包含两个Characteristic,一个被配置只读的通道(RX),另一个配置为只写的通道(TX)。
更多内容
-
Bluetooth SIG 官方文档
- 蓝牙核心协议文档
- Bluetooth Developer Portal
- 官方通过的 BLE Profile
- 官方通过的 BLE Service
- 官方通过的 BLE Characteristic
-
移动开发资源
- Android BLE GUIDE - Android developer 官网的入门文章,里面有实例代码和讲解视频。
- Application Accelerator Kit - iOS, Android or Windows Phone 移动开发样例
- 视频: Core Bluetooth 101 - WWDC 2012 关于 BLE 开发的视频。