原理
下图表示了小孔成像模型(图片及公式参考 OpenCV官方资料)
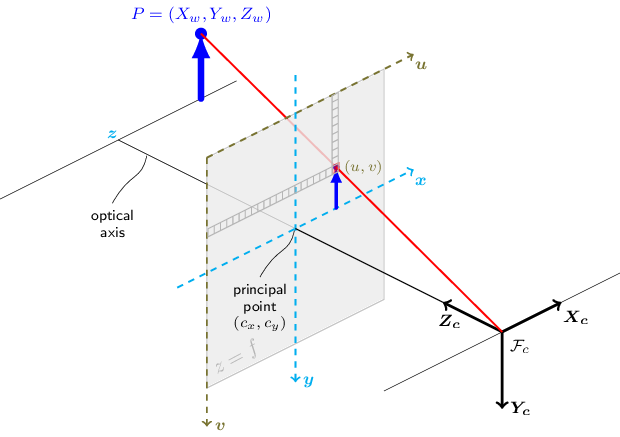
这个图里涉及4个坐标系:
- 世界坐标系:其坐标原点可视情况而定,可以表示空间的物体,单位为长度单位,比如MM(毫米),用矩阵$\begin{bmatrix} X_W \\ Y_W \\Z_W \end{bmatrix}$表示;
- 相机坐标系:以摄像机光心为原点(在针孔模型中也就是针孔为中心),z轴与光轴重合,也就是z轴指向相机的前方(与成像平面垂直),x轴与y轴的正方向与世界坐标系平行,单位为长度单位,比如MM(毫米),用矩阵$\begin{bmatrix}X_c \\ Y_c \\ Z_c\end{bmatrix}$表示;
- 图像物理坐标系(也叫成像平面坐标系):用物理长度单位表示像素的位置,坐标原点为摄像机光轴与图像物理坐标系的交点位置,单位为长度单位,比如MM(毫米),用矩阵$\begin{bmatrix}x \\ y \end{bmatrix}$表示。
- 像素坐标系:坐标原点在左上角,以像素为单位,有明显的范围限制,即用于表示全画面的像素长和像素长宽,矩阵$\begin{bmatrix}u \\ v \end{bmatrix}$表示。
以下公式描述了$\begin{bmatrix}u & v \end{bmatrix}^T$、$\begin{bmatrix}x & y \end{bmatrix}^T$、$\begin{bmatrix}X_c & Y_c & Z_c\end{bmatrix}^T$和$\begin{bmatrix}X_W & Y_W & Z_W \end{bmatrix}^T$之间的转换关系。
$z\begin{bmatrix}u \\ v\\ 1 \end{bmatrix}= \begin{bmatrix}1/d_x&0&c_x\\0&1/d_y&c_y\\0&0&1 \end{bmatrix} \begin{bmatrix}f&0&0\\ 0&f&0\\ 0&0&1 \end{bmatrix} \begin{bmatrix}r11&r12&r13&t1\\ r21&r22&r23&t2\\ r31&r32&r33&t3 \end{bmatrix} \begin{bmatrix}X_W \\ Y_W \\Z_W \\ 1\end{bmatrix}$
以上公式中,$d_x$和$d_y$表示1个像素有多少长度,即用传感器的尺寸除以像素数量,比如2928.384um * 2205.216um的传感的分辨率为2592 * 1944,每个像素的大小即约1.12um。
由于相机与物体的视角来看,都是三维坐标,因此两者之间的变换只需要进行矩阵的旋转、平移即可达到坐标系转换的目的(不同坐标系中,物体的绝对大小并不会随着坐标系的变化而变化,因此不涉及缩放处理)。对于变换矩阵 $\begin{bmatrix}r11&r12&r13&t1\\ r21&r22&r23&t2\\ r31&r32&r33&t3 \end{bmatrix}$ 需要理解,矩阵是由 3*3 的旋转矩阵 r (rotation) 和 3*1的平移向量 t (translation)组成。
$f$表示焦距,在上图中,根据相似三角形,P点和p点具有以下关系:
$\frac{X_c}{x} = \frac{Y_c}{y} = \frac{Z_c}{f}$ 即$x=X_c/(\frac{Z_c}{f})$ $y=Y_c/(\frac{Z_c}{f})$,可见:$f$越大,$x$和$y$越大,$Z_c$越大,$x$和$y$越小。
$c_x$和$c_y$表示中心点在像素坐标系中的位置。
要求像素坐标系中某像素点对应在世界坐标系中的位置,需要知道相机的内参、外参,相机的内参可以通过标定获得,外参可以人为设定。
第一步,将像素坐标变换到相机坐标系:
$z\begin{bmatrix}u \\ v\\ 1 \end{bmatrix} = \begin{bmatrix}f_x&0&c_x\\0&f_y&c_y\\0&0&1 \end{bmatrix} \begin{bmatrix}x \\ y\\ 1 \end{bmatrix} = K\begin{bmatrix}x \\ y\\ 1 \end{bmatrix}$
两边乘以K的逆后推导出:
$\begin{bmatrix}x \\ y\\ z \end{bmatrix}=K^{-1} \begin{bmatrix}u \\ v\\ 1 \end{bmatrix}$
第二步,从相机坐标系变换到世界坐标系:
$\begin{bmatrix}X_c \\ Y_c\\ Z_c \end{bmatrix} = R \begin{bmatrix}X \\ Y\\ Z \end{bmatrix} + t$
将方程乘以$R^{-1}$,可以推导出:
$\begin{bmatrix}X \\ Y\\ Z \end{bmatrix} = \begin{bmatrix}X_c \\ Y_c \\ Z_c \end{bmatrix}R^{-1} - t R^{-1}= z\begin{bmatrix}x\\ y\\ 1 \end{bmatrix}R^{-1} - t R^{-1}$
代码
通过输入相机的内参,旋转向量,平移向量和像素坐标,可以通过以下函数求出对应的世界坐标点。
以下代码中需求注意要对平移向量取转置,将1x3矩阵变为3x1矩阵后,才能实现3x3矩阵和3x1矩阵的乘法运算。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 |
void cameraToWorld(InputArray cameraMatrix, InputArray rV, InputArray tV, vector<Point2f> imgPoints, vector<Point3f> &worldPoints) { Mat invK64, invK; invK64 = cameraMatrix.getMat().inv(); invK64.convertTo(invK, CV_32F); Mat r, t, rMat; rV.getMat().convertTo(r, CV_32F); tV.getMat().convertTo(t, CV_32F); Rodrigues(r, rMat); //计算 invR * T Mat invR = rMat.inv(); //cout << "invR\n" << invR << endl; //cout << "t\n" << t << t.t() << endl; Mat transPlaneToCam; if(t.size() == Size(1, 3)){ transPlaneToCam = invR * t;//t.t(); } else if(t.size() == Size(3, 1)){ transPlaneToCam = invR * t.t(); } else{ return; } //cout << "transPlaneToCam\n" << transPlaneToCam << endl; int npoints = (int)imgPoints.size(); //cout << "npoints\n" << npoints << endl; for (int j = 0; j < npoints; ++j){ Mat coords(3, 1, CV_32F); Point3f pt; coords.at<float>(0, 0) = imgPoints[j].x; coords.at<float>(1, 0) = imgPoints[j].y; coords.at<float>(2, 0) = 1.0f; //[x,y,z] = invK * [u,v,1] Mat worldPtCam = invK * coords; //cout << "worldPtCam:" << worldPtCam << endl; //[x,y,1] * invR Mat worldPtPlane = invR * worldPtCam; //cout << "worldPtPlane:" << worldPtPlane << endl; //zc float scale = transPlaneToCam.at<float>(2) / worldPtPlane.at<float>(2); //cout << "scale:" << scale << endl; Mat scale_worldPtPlane(3, 1, CV_32F); //scale_worldPtPlane.at<float>(0, 0) = worldPtPlane.at<float>(0, 0) * scale; //zc * [x,y,1] * invR scale_worldPtPlane = scale * worldPtPlane; //cout << "scale_worldPtPlane:" << scale_worldPtPlane << endl; //[X,Y,Z]=zc*[x,y,1]*invR - invR*T Mat worldPtPlaneReproject = scale_worldPtPlane - transPlaneToCam; //cout << "worldPtPlaneReproject:" << worldPtPlaneReproject << endl; pt.x = worldPtPlaneReproject.at<float>(0); pt.y = worldPtPlaneReproject.at<float>(1); //pt.z = worldPtPlaneReproject.at<float>(2); pt.z = 1.0f; worldPoints.push_back(pt); } } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
def cameraToWorld(self, cameraMatrix, r, t, imgPoints): invK = np.asmatrix(cameraMatrix).I rMat = np.zeros((3, 3), dtype=np.float64) cv2.Rodrigues(r, rMat) #print('rMat=', rMat) #计算 invR * T invR = np.asmatrix(rMat).I #3*3 #print('invR=', invR) transPlaneToCam = np.dot(invR , np.asmatrix(t)) #3*3 dot 3*1 = 3*1 #print('transPlaneToCam=', transPlaneToCam) worldpt = [] coords = np.zeros((3, 1), dtype=np.float64) for imgpt in imgPoints: coords[0][0] = imgpt[0][0] coords[1][0] = imgpt[0][1] coords[2][0] = 1.0 worldPtCam = np.dot(invK , coords) #3*3 dot 3*1 = 3*1 #print('worldPtCam=', worldPtCam) #[x,y,1] * invR worldPtPlane = np.dot(invR , worldPtCam) #3*3 dot 3*1 = 3*1 #print('worldPtPlane=', worldPtPlane) #zc scale = transPlaneToCam[2][0] / worldPtPlane[2][0] #print("scale: ", scale) #zc * [x,y,1] * invR scale_worldPtPlane = np.multiply(scale , worldPtPlane) #print("scale_worldPtPlane: ", scale_worldPtPlane) #[X,Y,Z]=zc*[x,y,1]*invR - invR*T worldPtPlaneReproject = np.asmatrix(scale_worldPtPlane) - np.asmatrix(transPlaneToCam) #3*1 dot 1*3 = 3*3 #print("worldPtPlaneReproject: ", worldPtPlaneReproject) pt = np.zeros((3, 1), dtype=np.float64) pt[0][0] = worldPtPlaneReproject[0][0] pt[1][0] = worldPtPlaneReproject[1][0] pt[2][0] = 0 worldpt.append(pt.T.tolist()) #print('worldpt:',worldpt) return worldpt |
验证
先使用projectPoints生成像素点:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
Vec3f eulerAngles;//欧拉角 vector<Vec3d> translation_vectors;/* 每幅图像的平移向量 */ Mat rotationMatrix = eulerAnglesToRotationMatrix(eulerAngles); *pR_matrix = rotationMatrix; cvRodrigues2(pR_matrix, pnew_vec, 0); //从旋转矩阵求旋转向量 Mat mat_tmp(pnew_vec->rows, pnew_vec->cols, pnew_vec->type, pnew_vec->data.fl); cv::Mat distortion_coeffs1 = cv::Mat(1, 5, CV_32FC1, cv::Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */ projectPoints(tempPointSet, mat_tmp, translation_vectors[i], intrinsic_matrix, distortion_coeffs1, image_points2); |
使用以下欧拉角:
|
1 2 |
[0, 0, 0]//欧拉角度,表示平面和相机的角度 旋转向量:[0, 0, 0] |
对应的平移向量,表示空间坐标原点相对在相平面原点偏移x=134mm,y=132mm,z=200mm。
|
1 |
原始:[134.0870803179094, 132.7580766544178, 200.3789038923399] |
生成空间坐标点:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
Size board_size = Size(11,8); Size square_size = Size(30, 30); vector<Point3f> tempPointSet; for (int j = 0; j<board_size.height; j++) { for (int i = 0; i<board_size.width; i++) { /* 假设定标板放在世界坐标系中z=0的平面上 */ Point3f tempPoint; tempPoint.x = i*square_size.height; tempPoint.y = j*square_size.width; tempPoint.z = 0; tempPointSet.push_back(tempPoint); } } |
经projectPoints计算后对应的像素空间点是:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 |
projectPoints(tempPointSet, mat_tmp, translation_vectors[i], intrinsic_matrix, distortion_coeffs1, image_points2); cout << "原始空间点:\n" << image_points2 << endl; [1194.8174, 1074.1355; 1285.1735, 1074.1355; 1375.5295, 1074.1355; 1465.8856, 1074.1355; 1556.2417, 1074.1355; 1646.5978, 1074.1355; 1736.9539, 1074.1355; 1827.3099, 1074.1355; 1917.666, 1074.1355; 2008.0221, 1074.1355; 2098.3782, 1074.1355; 1194.8174, 1164.5713; 1285.1735, 1164.5713; 1375.5295, 1164.5713; 1465.8856, 1164.5713; 1556.2417, 1164.5713; 1646.5978, 1164.5713; 1736.9539, 1164.5713; 1827.3099, 1164.5713; 1917.666, 1164.5713; 2008.0221, 1164.5713; 2098.3782, 1164.5713; 1194.8174, 1255.0072; 1285.1735, 1255.0072; 1375.5295, 1255.0072; 1465.8856, 1255.0072; 1556.2417, 1255.0072; 1646.5978, 1255.0072; 1736.9539, 1255.0072; 1827.3099, 1255.0072; 1917.666, 1255.0072; 2008.0221, 1255.0072; 2098.3782, 1255.0072; 1194.8174, 1345.443; 1285.1735, 1345.443; 1375.5295, 1345.443; 1465.8856, 1345.443; 1556.2417, 1345.443; 1646.5978, 1345.443; 1736.9539, 1345.443; 1827.3099, 1345.443; 1917.666, 1345.443; 2008.0221, 1345.443; 2098.3782, 1345.443; 1194.8174, 1435.8789; 1285.1735, 1435.8789; 1375.5295, 1435.8789; 1465.8856, 1435.8789; 1556.2417, 1435.8789; 1646.5978, 1435.8789; 1736.9539, 1435.8789; 1827.3099, 1435.8789; 1917.666, 1435.8789; 2008.0221, 1435.8789; 2098.3782, 1435.8789; 1194.8174, 1526.3147; 1285.1735, 1526.3147; 1375.5295, 1526.3147; 1465.8856, 1526.3147; 1556.2417, 1526.3147; 1646.5978, 1526.3147; 1736.9539, 1526.3147; 1827.3099, 1526.3147; 1917.666, 1526.3147; 2008.0221, 1526.3147; 2098.3782, 1526.3147; 1194.8174, 1616.7506; 1285.1735, 1616.7506; 1375.5295, 1616.7506; 1465.8856, 1616.7506; 1556.2417, 1616.7506; 1646.5978, 1616.7506; 1736.9539, 1616.7506; 1827.3099, 1616.7506; 1917.666, 1616.7506; 2008.0221, 1616.7506; 2098.3782, 1616.7506; 1194.8174, 1707.1864; 1285.1735, 1707.1864; 1375.5295, 1707.1864; 1465.8856, 1707.1864; 1556.2417, 1707.1864; 1646.5978, 1707.1864; 1736.9539, 1707.1864; 1827.3099, 1707.1864; 1917.666, 1707.1864; 2008.0221, 1707.1864; 2098.3782, 1707.1864] |
经函数求出的空间坐标点是:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 |
vector<Point3f> worldPoint; cameraToWorld(intrinsic_matrix, mat_tmp, translation_vec_tmp, image_points2, worldPoint); cout << "计算空间点:\n" << worldPoint << endl; [0, 0, 1; 30, 0, 1; 60, 0, 1; 90.000015, 0, 1; 120.00002, 0, 1; 149.99995, 0, 1; 179.99998, 0, 1; 209.99998, 0, 1; 239.99998, 0, 1; 270, 0, 1; 300, 0, 1; 0, 29.999985, 1; 30, 29.999985, 1; 60, 29.999985, 1; 90.000015, 29.999985, 1; 120.00002, 29.999985, 1; 149.99995, 29.999985, 1; 179.99998, 29.999985, 1; 209.99998, 29.999985, 1; 239.99998, 29.999985, 1; 270, 29.999985, 1; 300, 29.999985, 1; 0, 60.000015, 1; 30, 60.000015, 1; 60, 60.000015, 1; 90.000015, 60.000015, 1; 120.00002, 60.000015, 1; 149.99995, 60.000015, 1; 179.99998, 60.000015, 1; 209.99998, 60.000015, 1; 239.99998, 60.000015, 1; 270, 60.000015, 1; 300, 60.000015, 1; 0, 89.999969, 1; 30, 89.999969, 1; 60, 89.999969, 1; 90.000015, 89.999969, 1; 120.00002, 89.999969, 1; 149.99995, 89.999969, 1; 179.99998, 89.999969, 1; 209.99998, 89.999969, 1; 239.99998, 89.999969, 1; 270, 89.999969, 1; 300, 89.999969, 1; 0, 120.00002, 1; 30, 120.00002, 1; 60, 120.00002, 1; 90.000015, 120.00002, 1; 120.00002, 120.00002, 1; 149.99995, 120.00002, 1; 179.99998, 120.00002, 1; 209.99998, 120.00002, 1; 239.99998, 120.00002, 1; 270, 120.00002, 1; 300, 120.00002, 1; 0, 149.99998, 1; 30, 149.99998, 1; 60, 149.99998, 1; 90.000015, 149.99998, 1; 120.00002, 149.99998, 1; 149.99995, 149.99998, 1; 179.99998, 149.99998, 1; 209.99998, 149.99998, 1; 239.99998, 149.99998, 1; 270, 149.99998, 1; 300, 149.99998, 1; 0, 179.99998, 1; 30, 179.99998, 1; 60, 179.99998, 1; 90.000015, 179.99998, 1; 120.00002, 179.99998, 1; 149.99995, 179.99998, 1; 179.99998, 179.99998, 1; 209.99998, 179.99998, 1; 239.99998, 179.99998, 1; 270, 179.99998, 1; 300, 179.99998, 1; 0, 209.99998, 1; 30, 209.99998, 1; 60, 209.99998, 1; 90.000015, 209.99998, 1; 120.00002, 209.99998, 1; 149.99995, 209.99998, 1; 179.99998, 209.99998, 1; 209.99998, 209.99998, 1; 239.99998, 209.99998, 1; 270, 209.99998, 1; 300, 209.99998, 1] |
可以对比按11*8格和30mm/格所生成空间坐标点结果,基本一致。